We wondered ourselves and research how to improve interactions in remote areas where the electricity it's not granted. There are a bunch of opportunities if we think about education, information, entertainment, sports, cooking, business models, health without electricity. This happens because if we disconnect systems from the grid we realize that everything has to operate differently and efficiently, being that this time the energy is a variable and not a constant.
We spent so much time brainstorming about so many opportunities. Finally, we decided to choose an aspect which has improve quality life since It appeared: Telecommunications. What about if we are able to communicate people through long distances, being out of the grid A.K.A: using solar or kinetic energy.
Radio is a technology discovered in 1820 and really well documented in order to make functional prototypes. With this in mind, we build an FM transmitter in order to test the capabilities of this accessible radio sender.
This radio transmitter is based on this tutorial:
http://www.instructables.com/id/The-Ultimate-FM-Transmitter/
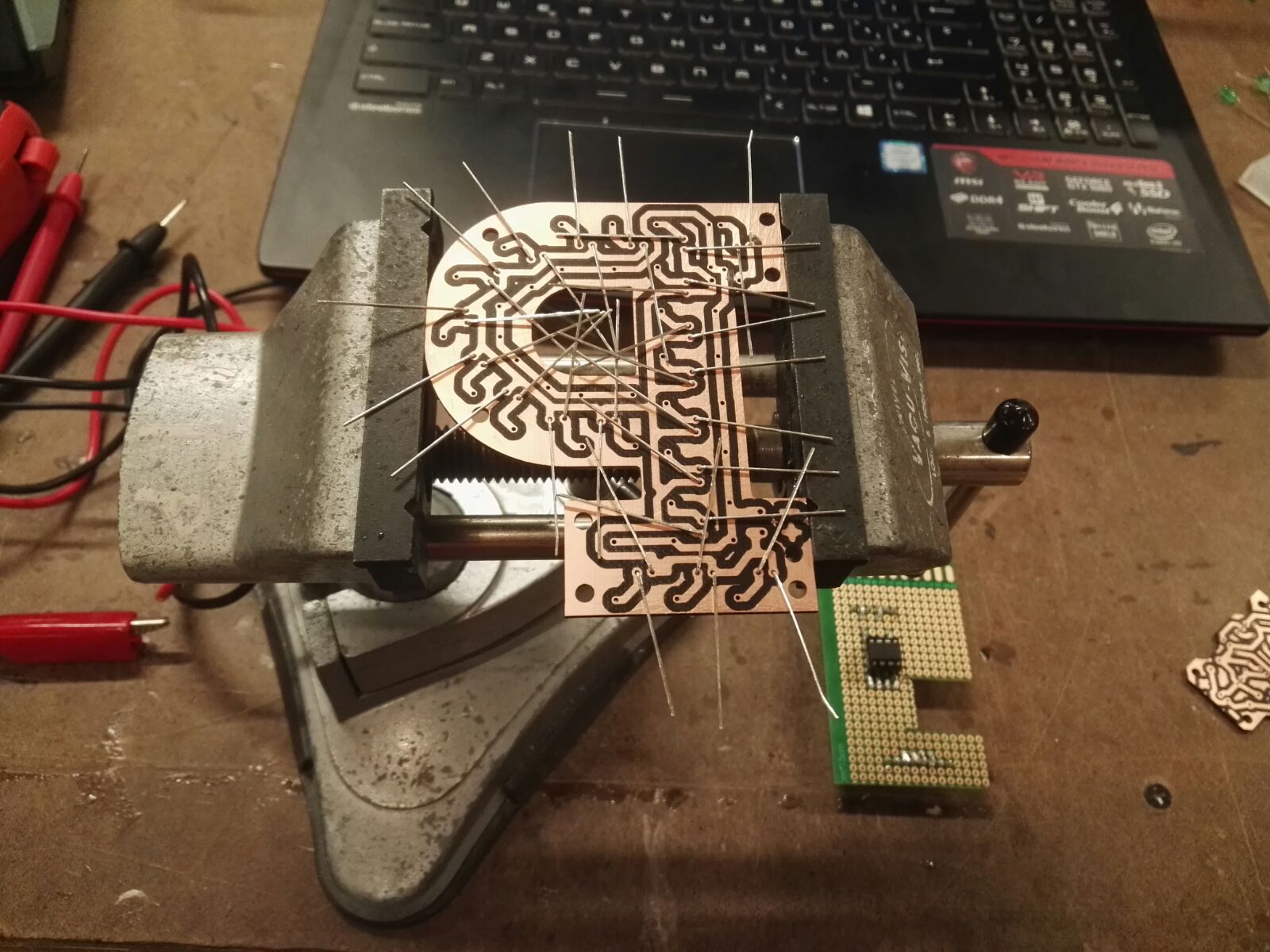
We changed some parts in order to make it functional with the parts we had access to and to understand it better. So instead of using a trimmer capacitor we used an arrange of fixed capacitors connected in series and parallel to get about 30pF.
The first problem we faced was that the radio frequency was out from the radio receiver range, which means we weren't able to listen to our transmitter with a regular radio (88.1MHz - 108.1MHz) which was our first test. So we had to find our signal with a bigger receiver and wiggle our prototype to reach the final 88.9MHz. Once there, we are able to hear people at almost 300 meters. Although, this system is pretty unstable and it demands shielding and a bigger ground in order to make it work in the same frequency all the time. Any capacitance nearby was changing the frequency in at least 0.1Mhz, make it impossible a proper debugging.
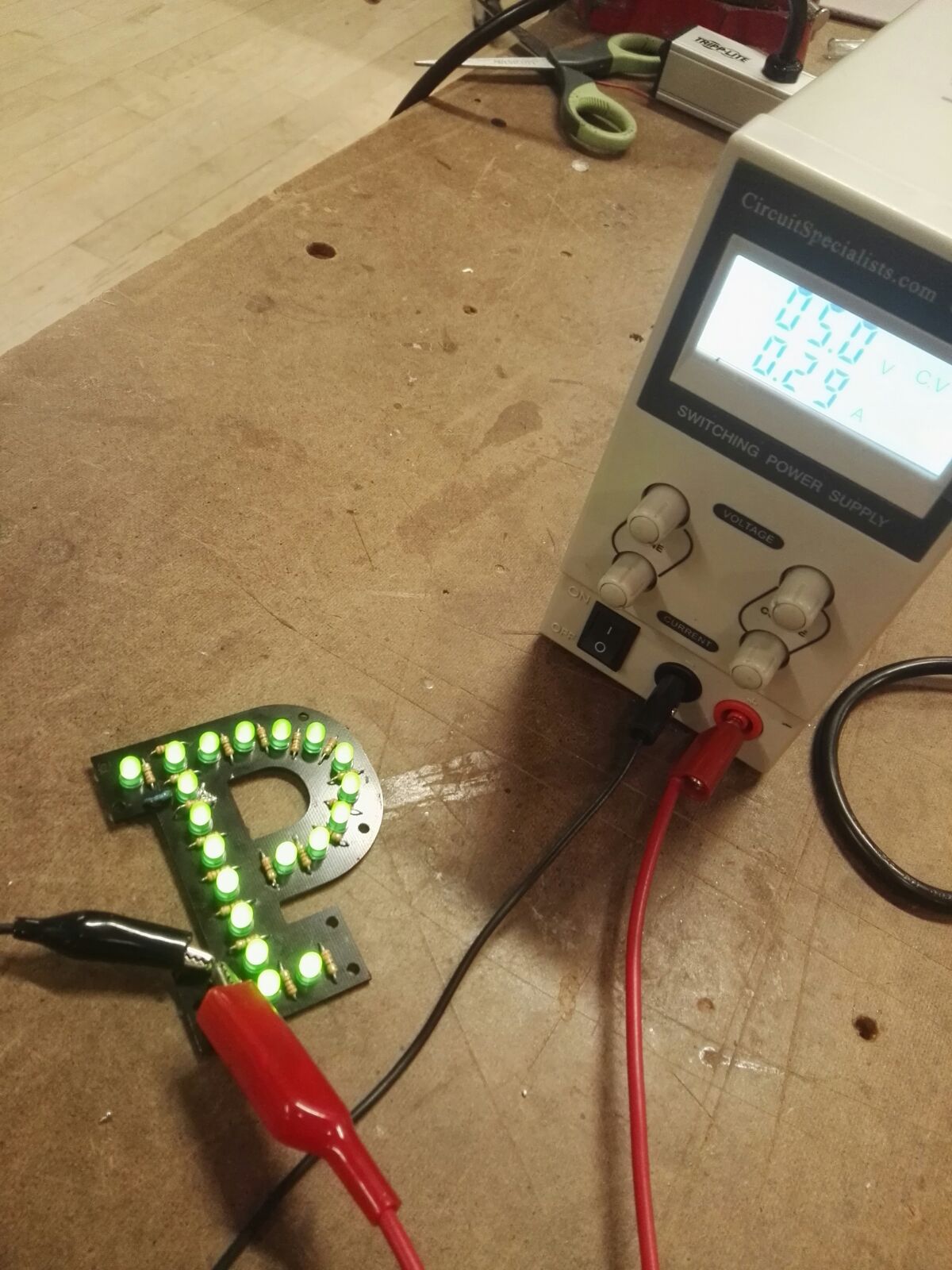
Besides of that, we weren't communicating people properly. An FM Transmitter just sends data but it doesn't receive it, this is a one-way communication device. The easy part of these kinds of devices is the transmitter, the receiver is so much complex to built and too difficult to calibrate. On the other hand, this little was consuming 9V and 0.16 A. We decided to not "recreate the wheel" and go with some circuit that fits our purpose. WalkieTalkies would be!.
The walkie talkies are radio transmitters and receivers in UHF 462-467 MHz and consume 3 x AA each connected in series = 4.5 V. Taking them apart and testing with a power supply we got the minimum power level we need in order to make it work
MIN POWER IN SLEEP MODE: 3.4 V - 0.06 A
MIN POWER RECEIVING RADIO: 3.4 V - 0.14 A
MIN POWER TRANSMITTING DATA: 3.4 V - 0.36 A



Taking in the count this data we realized the decision of buying existing walk-talkies was right. The power consumption is less than our initial prototype and the capabilities are so much bigger.
We removed the screen and the headphones to measure the power consumption and notice a significant difference. There is no one or too insignificant. We decided to keep this extra pieces, being that they are not expensive energitacally speaking.